最新博彩网址博士生郭广信在航空航天领域国际知名期刊发文
近日,最新博彩平台网址博士研究生郭广信在航空航天领域国际知名期刊《Aerospace Science and Technology》(影响因子:5.8,中科院一区TOP)上发表题为"Dynamic event-triggered predefined-time adaptive attitude fault-tolerant control for uncertain unmanned aerial vehicles with disturbances and actuator faults"的研究成果,郭广信为第一作者,指导老师肖绍球教授为通信作者,博彩网址侯治威副教授和硕士研究生陈富昌共同参与该研究。该研究针对存在扰动、模型不确定性和执行器故障的无人机姿态跟踪问题,提出了一种新的动态事件触发预定义时间自适应滑模容错控制协议(DEtPtASMC),能够使得无人机在存在执行器故障的情况下依然实现预定时间稳定。研究小组通过Lyapunov理论证明了闭环系统的预定义时间稳定性,其收敛时间仅由单一预设参数确定。该项成果为无人机在强扰动、部分故障等极端工况下的可靠运行提供了一种较为完备的理论控制方案。
研究创新
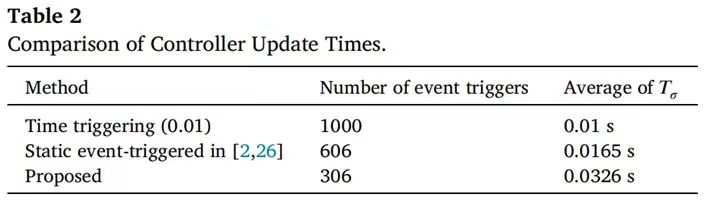
1. 本研究将动态事件触发机制与预定义时间控制理论相结合来处理网络化无人机控制的姿态稳定问题,设计出基于动态事件触发机制的分段滑模选择功能的辅助变量构造方法,触发机制自适应动态改变从而显著降低了系统计算负担,提升网络利用率。对比传统时间触发方法,资源优化达到69.4%,且将平均事件触发间隔时间扩大1.65倍;对比传统固定阈值事件触发机制,资源优化达到49.5%,且将平均事件触发间隔时间扩大3.26倍;
2. 提出不依赖扰动先验知识的自适应估计机制,为算法的实际应用提供了基础;
3. 建立的新型容错控制协议成功实现无人机姿态误差的预定义时间收敛即使实在扰动,内部不确定性和执行器故障的约束下,系统收敛时间完全由预设参数决定。
应用价值
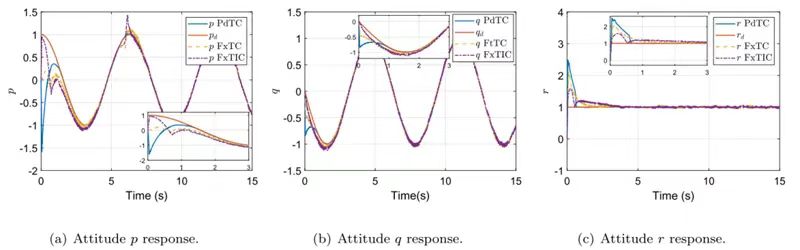
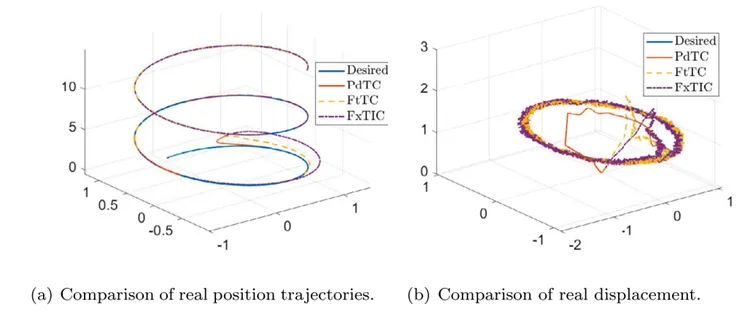
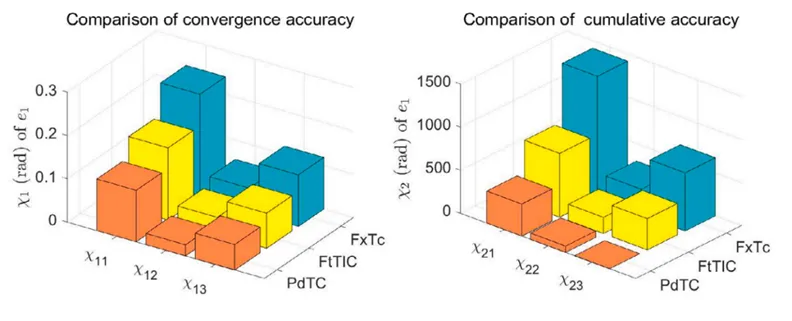
仿真实验表明,新方法可使无人机在存在某一时间执行器故障和复合干扰的情况下,对比两种固定时间控制方法姿态跟踪精度提升33.33%和58.33%,网络计算资源消耗降低49.5%和69.4%。且该方法不受扰动上界限制。该技术可广泛应用于应急救援、电力巡检等对可靠性和实时性要求严苛的无人机应用场景。同时也为多网络化无人机协作算法的研发与评估提供了理论支撑。
论文链接
//www.sciencedirect.com/science/article/pii/S1270963825005528#aep-article-footnote-id1